
accčs au source
(cette page utilise la police "greek.ttf" pour afficher les caractčres grecs)accueil Companime / accueil Immersion / console comPanrama / logiciels détail du calcul
accčs au source
|
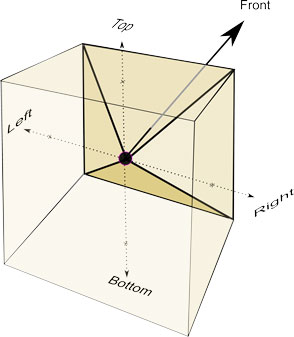
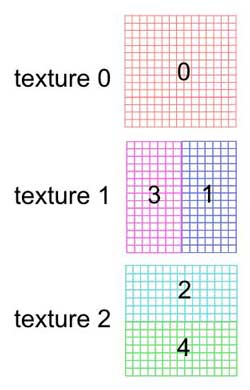
Obtention de 5 images en perspective classique en gardant ces images en mémoire, sans les afficher. Dans la convention OpenGL, par défaut la caméra est centrée ŕ l'origine et regarde du coté des Z négatifs. La caméra reste centrée ŕ l'origine, mais se trouve successivement dirigée vers : - image 0 : les Z négatifs -> texture 0 - image 1 : les X négatifs, (rotY +90°) -> texture 1 (partie droite) - image 2 : les Y négatifs, (rotX -90°) -> texture 2 (partie inférieure) - image 3 : les X positifs, (rotY -90°) -> texture 1 (partie droite) - image 4 : les Y positifs. (rotX +90°) -> texture 2 (partie supérieure)Ceci est ma convention. Apparemment chacun fait ŕ sa guise dans ce domaine. La caméra a une ouverture de 90° horizontalement et verticalement. Seule la face 0 est entičre. Les cotés ne sont que des demi-faces. On utilise la fonction glFrustum qui permet de filmer une demi-face. L'extension FBO (Frame Buffer Object) permet d'enregistrer les images comme texture sans les afficher (sans les envoyer dans le "Frame Buffer"). [voir dans le source le module PanCamera.cpp et la fonction CPanCamera::shot() ]< > |
 |
 |
 |
 |
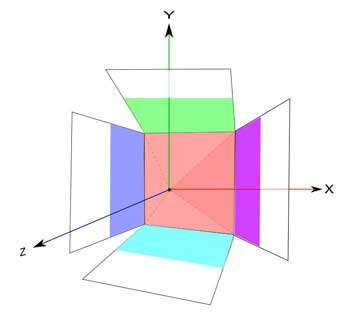
la caméra-cube "ouverte" |
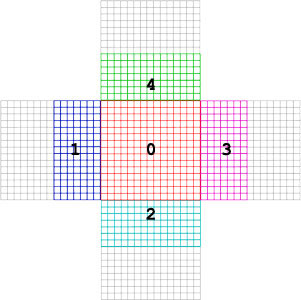
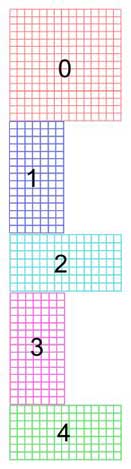
numérotation des faces et du maillage |
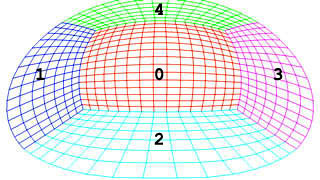
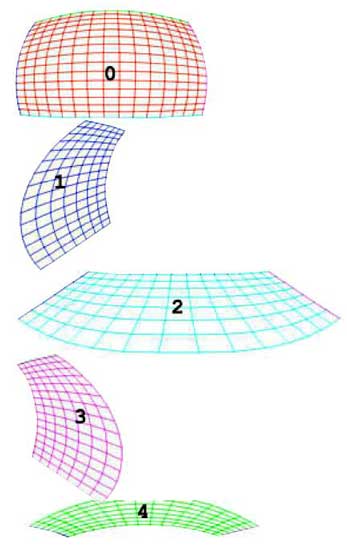
le maillage-miroir |
 |
 |
 | |
configuration des textures |
maillage "linear" |
maillage miror |
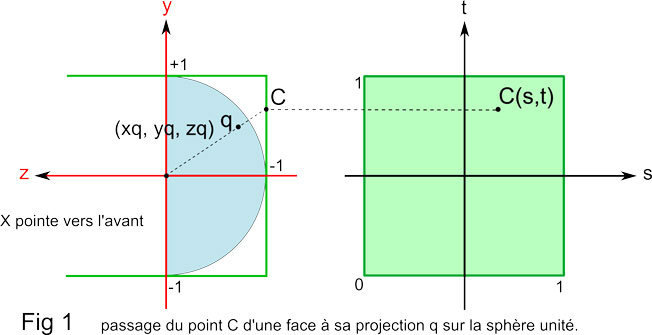
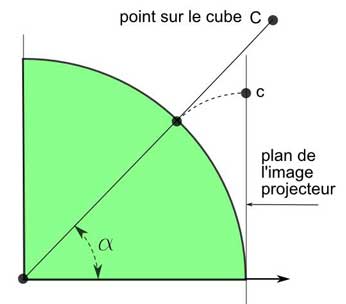
| Un point C d'une face du cube est représenté par ses coordonnées textures (s,t), s et t variant de 0 ŕ 1 (imposé par OpenGL). |
Mais le point C a aussi des coordonnées spatiales x, y et z telles que, pour chaque face :
face 0 x = 2s-1 y = 2t-1 z = -1 front face 1 x = -1 y = 2t-1 z = 1-2s left face 2 x = 2s-1 y = -1 z = 1-2t bottom face 3 x = 1 y = 2t-1 z = 2s-1 right face 4 x = 2s-1 y = 1 z = 2t-1 topLe point C a pour image le point q situé sur la sphčre unité inscrite dans le cube : Si L est la distance du centre de la sphčre unité au point C situé sur la face, on a : L = racine carrée (x2+ y2 + z2) xq = x/L yq = y/L zq = z/L [ voir dans la classe CMesh les fonctions build_fisheye() et build_miror() ] |
 |
Systčme avec fisheye
Calcul du chemin inverse : fonction CMesh::xyz_fisheye_uv()
|
Si le systčme est centré (l'optique et la coupole ont le męme axe) le calcul est simple. (Dans le cas contraire (que je n'ai pas étudié), on est proche d'un systčme avec miroir). (x,y,z sont les coordonnées d'un point C situé sur le cube caméra) (u,v sont les coordonnées du point c correspondant dans l'image projecteur) Trois étapes : - calcul de l'angle Q entre le plan horizontal (ox,oz) et le plan passant par C et oz. - calcul de l'angle a entre oz et oC. - module du point c. En fait on "déroule" la demi-sphčre sur le plan tangent. [ pour en savoir plus, voir le source Mesh.cpp et Mesh.h ] |
 |
|
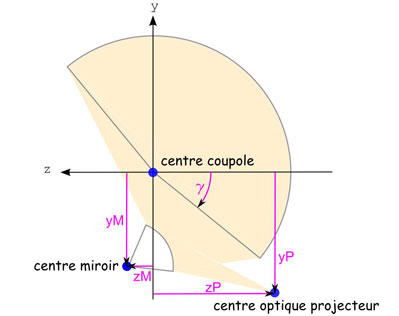
Nous avons besoin de deux systčmes de référentiels : 1) le premier zy (minuscules) sert ŕ définir la configuration physique de la console. Il est utilisé pour communiquer cette configuration au logiciel comPanConfig. Des trois éléments composant la console : coupole, miroir, projecteur, la coupole, ŕ cause de sa taille, est le plus stable les réglages se font en déplaçant le miroir ou le projecteur). On prend donc comme origine le centre de la coupole. L'axe y est vertical, l'axe z est orienté dans le sens projecteur->miroir. (ceci est cohérent avec OpenGL). Les coordonnées du miroir sont donc zM et yM (yM est negatifs sur la figure) Celles du projecteur zP et yP (tous deux negatifs sur la figure) La coupole est inclinée d'un angle (gamma) (environ -45° sur la figure) |
 |
|
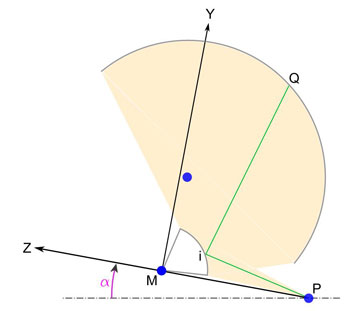
2) le second ZY (majuscules) est le référentiel interne de calcul. On a besoin de le connaître seulement pour comprendre le source des logiciels. L'origine est prise au centre du miroir M. L'axe Z passe par le projecteur. Il est dirigé encore dans le sens projecteur->miroir. L'axe X est horizontal, dirigé vers nous. Ce référentiel est incliné d'un angle (alpha) par rapport au précédent. (environ -20° sur la figure) On applique un facteur d'échelle qui rend le rayon du miroir égal ŕ 1. L'échelle n'a, en fait, aucune importance car le maillage résultant sera d'abord normalisé en (O,1), puis ajusté ŕ la définition de l'image (1280 dans mon cas). |
 |
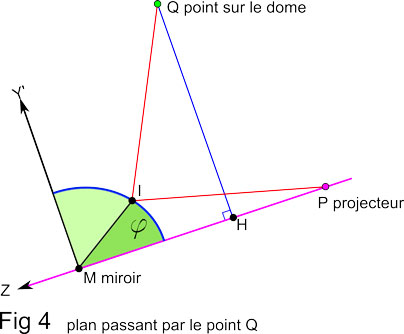 |
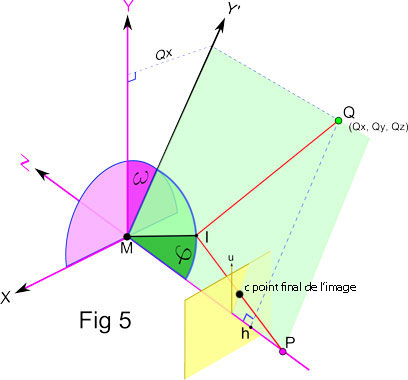
Considérons le plan ZY' qui contient les points M, P, Q et I (il fait un angle w avec le plan vertical ZY) : Dans ce plan les coordonnées de Q sont (MH=Qz, HQ) celle de P est Pz (Py==0) le segment IQ a pour composantes Qz - cos(f)
et Qy - sin(f) |
La difficulté du calcul se ramčne ŕ déterminer f pour que l'expression :
 soit minimale.
soit minimale.
|
On ne sait pas calculer directement une telle expression. Il faut faire appel ŕ une technique d'approximations successives. (Heureusement il y a toujours quelque internaute de bonne volonté qui met son travail ŕ disposition et fait gagner beaucoup de temps). Ce calcul est relativement lent. Mais on ne calcule les grilles qu'une seule fois. En résumé, le point Q, situé sur la coupole, |
 |